Qué saber antes de montar un brazo robótico Arduino
Vamos a mostrarte algunos conceptos para que puedas entender cualquier tutorial sobre cómo hacer un brazo robótico con motores controlado por Arduino.
Arriba tenemos un brazo robótico Arduino barato, de materiales reciclados.
Aquí encontrarás...
Desde la Robótica industrial al brazo robótico Arduino
La automatización y control de procesos que hoy en día vemos en todas las industrias, desde la fabricación de microchips, hasta el ensamblaje de coches ha sido posible gracias a la revolución industrial.
Iniciada a finales del siglo XVIII, fue la piedra angular que fundó las bases de la inclusión de maquinaria dentro de los procesos industriales. Hoy en día son los robot quienes reemplazan a sus ancestros, las máquinas a vapor.

Articulaciones rotoides y prismáticas
Existen 8 combinaciones posibles de articulaciones prismáticas y rotoides en un robot.
No obstante son 5 las configuraciones reconocidas a nivel mundial por la mayoría de diseñadores, estas son:
- Cartesiano
- Cilíndrico
- Esférico
- Toroidal o SCARA
- Antropomórfico
Como nos podemos liar mucho si empezamos a desguazar cada categoría de RI (Robots Industriales) Nos vamos a quedar con dos de ellas solamente, la configuración esférica y antropomórfica.
Con esto nos basta para la construcción de un brazo robótico.
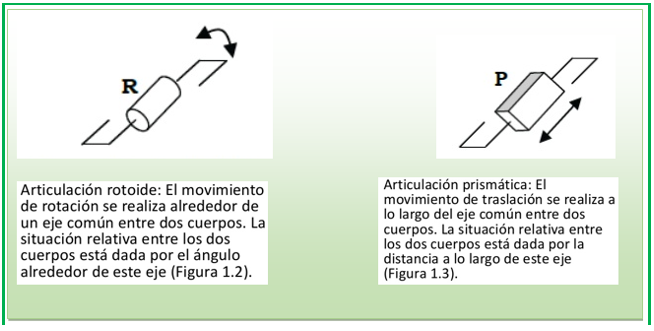
La configuración esférica es RRP, es decir, posee 2 articulaciones rotoides y 1 prismática.
Por su parte los robot antropomórficos emulan el movimiento del cuerpo humano, siendo RRR poseen solamente articulaciones rotoides, una para simular la cadera y el resto se encarga de emular el brazo y antebrazo.
Aspectos básicos a saber de un brazo robot
Empezar con un brazo automatizado tipo esférico
Un brazo automatizado del tipo esférico, limita su movimiento a todos los puntos que se encuentren dentro de dos esferas, este podríamos decir que es el brazo robot más sencillo.
El robot antropomórfico es mucho más complejo (y difícil de programar), puesto que en teoría puede alcanzar todos los puntos que se encuentren dentro de una esfera de máximo alcance.
Si eres principiante lo mejor es que comiences por estudiar la teoría de un brazo robot de tipo esférico, antes de liarte con todas las articulaciones que puede llegar a poseer un brazo robot antropomórfico.
Por ejemplo, aquí vemos en acción un brazo robótico Arduino de 4 DOF:
Sopesar entre un brazo ligero u otro de rango de acción más complejo
También influye en esta decisión la usabilidad y función que va desempeñar tu robot.
Por ejemplo si deseas un brazo robot ligero para colocar sobre algún vehículo, lo mejor es optar por el robot cilíndrico, puesto que al tener menos articulaciones su peso también se ve disminuido.
Por otra parte, si lo que deseas es un rango de acción más complejo, con ángulos de ataque por parte de la herramienta al plano de trabajo que atraviesen cavidades estrechas, entonces el robot antropomórfico es tu opción a elegir.

Programación de un brazo robot
Este es el punto donde el proyecto se puede complicar o no. Hay dos caminos que puedes elegir para enfrentar este punto, en el primero te decides por hacer la programación tu mismo. Esto requiere de un estudio de la cinemática del robot, ya sea que hagas la aproximación directa o inversa.
Para ello deberás encontrar la matriz de transformación que gobierna al robot y luego realizar la programación en python o MatLab.
Programar el brazo robótico con LabView y librerías de Arduino
El segundo camino es hacer uso de herramientas como LabView y las librerías que Arduino pone a nuestra disposición, empleando una placa arduino micro o arduino nano según sea tu necesidad.
El primer software nos ayuda a realizar la programación del robot “sin saber programar”, es un sistema de programación por visualización de objetos. Las librerías de arduino harán posible la compatibilidad entre el programa de nuestro robot elaborado en LabView y la placa Arduino.
Pinchando en la imagen de abajo podrás acceder a cualquier proyecto de brazo robótico Arduino que te guste:
Tamaño y tipo de servomotores
Vamos a tratar de resumir este tema en la menor cantidad de palabras posible, ya que hay mucha tela para cortar. Por ello formaremos dos grandes grupos de servomotores para clasificarlos por tipos:
Tipos de servomotores analógicos y digitales
Servomotores analógicos
Son el estándar en cuanto a servomotores se refieren. Se destacan por ser controlados por medio de un potenciómetro que regula los ángulos de rotación en función del voltaje.
Servomotores digitales
Más novedosos, con una respuesta más precisa y rápida gracias a que son digitales. También traen consigo un precio más elevado. Por ejemplo, un servomotor digital con capacidad de 5 kg suele tener el mismo precio que un servomotor analógico con el doble de capacidad.

También podríamos destacar un tercer grupo de servomotores, los cuales son capaces de rotar unos 1260 grados o más, es decir tienen la capacidad de dar tres vueltas o más. Sin embargo estos modelos pueden ser tanto digitales como analógicos, por ende serían más bien una subcategoría de los que ya mencionamos.
El tamaño de los servomotores va por peso
El tamaño de los servomotores refiere más al peso que al volumen de los mismo.
Por ejemplo los modelos catalogados como “mini” van de los 1,3 kg de capacidad hasta los 2,5 kg, con pesos que oscilan entre los 8 y 13 gramos respectivamente. Son generalmente utilizados en aplicaciones aeronáuticas a escala y pequeños robots.
Un servo motor estándar tiene una capacidad entre los 5 y 10 kg. Aunque se van un poco en cuanto a peso para conformar las articulaciones de un robot, pueden ser utilizados para la “cadera” del robot.
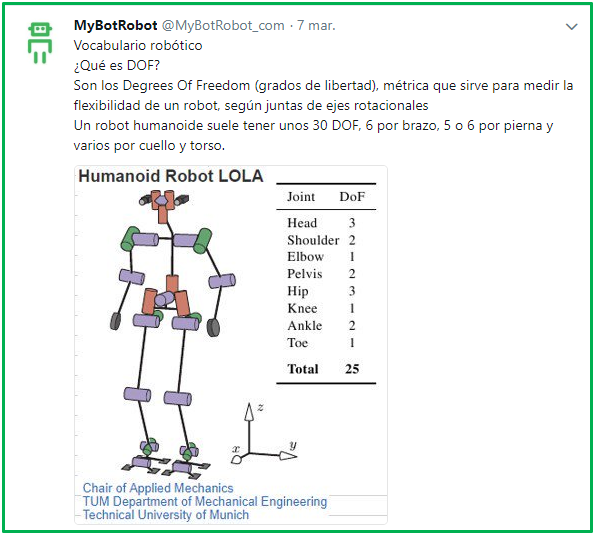
Grados de libertad de un brazo robot
Generalmente encontrarás información sobre los grados de libertad como DOF por sus siglas en inglés Degrees of Freedom.
Los grados de libertad refieren al número de articulaciones que tiene el brazo robótico. La razón por la cual no se cuenta la articulación presente en la herramienta como un grado de libertad, es porque la misma no influye en el alcance en el rango de trabajo del robot.
En caso de que hayas comprado un kit para ensamblar un brazo robot, asegúrate de que no hayan contado la articulación de la herramienta como un grado de libertad.
Un brazo puerta batiente posee un sólo DOF, siendo un robot cartesiano.
Ahora bien, para un brazo robótico de uso industrial el mínimo de DOF es 3. Recordemos que al principio los definimos en función de su modelo. Los RRP para el robot esférico y RRR para el brazo robótico antropomórfico.
Materiales para la construcción de un brazo robótico Arduino
- Servomotores
- Placa arduino
- Protoboard
- Utensilios de electrónica (cables, interruptores, etc)
- Pilas, baterías o alguna fuente de alimentación
- Partes del robot: puedes utilizar materiales reciclados como paletas de helado para hacer el brazo del robot. También puedes comprar kits. O incluso utilizar algún polímero cortado a la medida, o imprimir piezas 3D.
Estas son las ideas básicas que necesitas para saber cómo construir un brazo robótico con servomotores.
¿Te has decidido a montar un brazo robótico Arduino? Visita nuestro próximo post, te damos presupuesto, ideas y opciones.
Quizá te pueda interesar ….
¡Haz clic en la imagen para seguir el link!


¿Quieres saber cómo nació MyBotRobot?
Aquí tienes una reseña y valoración del curso con el que hice esta web